在构成贴片机的运动控制系统中,除了电动机,伺服控制器和驱动放大器外,还有如下主要器件。
(1)编码器
编码器是将机械位移量(包括转动角度和直线位移)转化为电脉冲信号的器件。在工作过程中,它会将电脉冲信号或位置数据传送给控制系统,于是便将被控部件的机械位移量反馈给控制系统,从而实现闭环位置控制。从目前的应用情况来看,主要有两大类,即实现角度位置反馈的旋转编码器和直线位置反馈的磁/光栅尺,下面将进行简单的介绍。
1)旋转编码器
旋转编码器按信号原理分为增量型和绝对型。增量型编码器只向伺服控制器输出脉冲信号,它仅提供相对的位置和增/减信息,而位置增/减信息则根据A、B相的发生先后(谁的相位领先)由控制器判断;绝对型编码器向伺服控制器输出的是数字号,其内部含有微型处理器,它定义了一个绝对原点,并将其产生的脉冲信号经处理器处理后,转化成数字代码送给伺服控制,这些位置数据都是相对于原点的绝对位置。旋转编码器按感应原理主要可分成两大类,一是采用磁感应原理构成的旋转编码器;另一种是采用光电转换原理构成的旋转编码器。下面以目前较流行的按光电转换原理构成的旋转编码器基本结构进行介绍。
2)增量型旋转编码器
图1是某品牌增量型旋转编码器的实物图片。

图1 某品牌增量型旋转编码器的实物图片
图2是增量型旋转编码器的基本结构,图中编码器的输出信号是TTL脉冲信号。
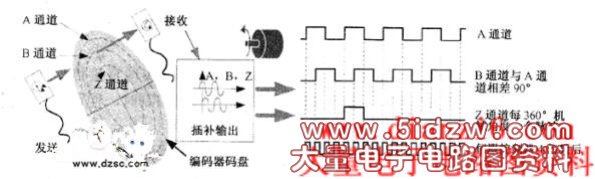
图2 增量型旋转编码器的基本结构
编码器码盘的放大图如图3所示。
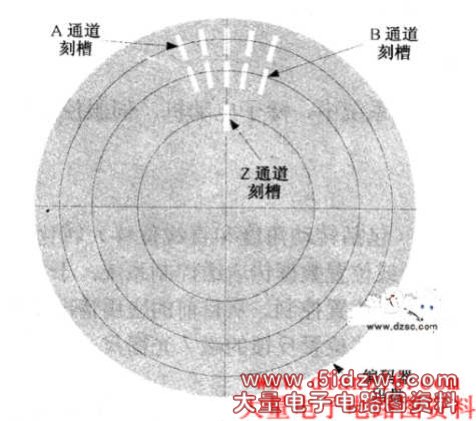
图3 编码器码盘的放大图
A. 工作原理
其中心是有轴的码盘如图3所示,码盘上有径向分布的开槽(通常有3组,A,B和Z),码盘两侧分布有光电发射和接收器件(光电感应器,如图3所示),当某个开槽经过相应的光电感应器时,光电感应器导通,通过内部3个光敏(A相,B相和Z相)接收管转化其角度码盘的时序和相位关系产生输出信号,最终经编码器处理后将获得3种脉冲信号组合成A、B、Z。其中B相滞后A相90°相位差(相对于一个周波为360°),而z相脉冲每360°机械角度输出一个。A、B相将作为位置反馈之用,通过它们可得到码盘角度位移量增加(正方向)或减少(负方向),同时由于A、B两相相差90°,可通过比较A相在前还是B相在前,判别编码器的正转与反转,而Z相脉冲可作为零位参考。
B.编码器码盘材料
编码器码盘是编码器的重要部分,其材料有玻璃、金属和塑料。玻璃码盘是在玻璃上沉积很薄的开槽,其热稳定性好,精度高;金属码盘直接以通和不通开槽,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级;塑料码盘是经济型的,其成本低,但精度、热稳定性和寿命均要差一些。
C.分辨率
编码器每旋转360°提供多少的刻槽称为分辨率,也称解析分度或直接称多少线,一般在每转分度5~10000线。
D.信号输出
信号输出有正弦波(电流或电压)、方波(TTL和HTL)、集电极开路(PNP和NPN)及推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。
E.增量式编码器的问题
增量型编码器存在零点累计误差,抗干扰较差,接收设各的停机需断电记忆,开机应找零或参考位等问题,这些问题如选用绝对型编码器可以解决。增量型编码器的一股应用有:测速、测转动方向及测移动角度和距离(相对)。
F.构成系统理论反馈精度计算举例
由增量型旋转编码器构成的位置反馈系统,假设编码器苴接与电动机轴相连,并且为1 000线,那么电动机每转动360°,采用4倍频(取A和B相的上升沿和下降沿)的伺服控制器将记录得到1 000×4=4 000个脉冲数。假定该系统的传动比为1,那么对于:
①角位置系统,如θ轴,该角位置系统的理论反馈精度为
10/1/4 000=0.09°/脉冲
②直线系统,假定滚珠丝杆的节距为lO mm每转(360°),由此而来的该线性系统的理沦反馈精度为
10/1/4000=0.0025 mm /脉冲=2.5 μm /脉冲
3)绝对型旋转编码器
绝对编码器光码盘上有许多道光通道开槽,每道开槽依次以2线、4线、8线、16线……编排,这样,在编码器的每一个位置,通过读取每道开槽的通、暗,获得一组从2的零次方到2的nˉ1次方的唯一的2进制编码(通常采用格雷码),这就称为n位绝对编码器。
绝对编码器由机械位置决定的每个位置是唯一的,它无须记忆(因而它不受停电的影响),无须找参考点,而且不用―直计数,什么时候需要知道位置,什么时候就去读取它的位置,因而编码器的抗干扰特性和数据的可靠性大大提高了。
绝对烈编码器分为:单圈绝对值编码器和多圈绝对值编码器。
A.旋转单圈绝对值编码器
以转动中测量光电码盘各道开槽,以获取唯一的编码,当转动超过360°时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码只能用于旋转范围360°以内的测量,称为单圈绝对值编码器。
如果要测量旋转超过360°范围,就要用到多圈绝对值编码器。
B.多圈绝对值编码器
编码器生产厂家运用类似组合齿轮机械的原理(如机械手表),当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器。它同样是由机械位置确定编码,每个位置编码唯一不重复,而无须记忆。
另外,多圈绝对值编码器由于可测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点, 将某一中间位置作为起始点就可以了,而大大简化了安装调试难度,当然其成本相对于增量型旋转编码器要高。
绝对型编码器构成的位置系统理论反馈精度与增量型编码器相似,请参考前面的讲解。
(2)磁栅尺
磁栅尺由磁栅尺和磁头检测电路组成,它利用电磁特性和录磁原理对位移进行测量。磁栅尺是在非导磁性直线标尺基体上,采用化学涂覆或电镀工艺,在非磁性直线标尺基体上沉积一层磁性膜(通常10-20μm)制成的,在磁性膜上录制代表一定长度,具有一定波长的方波或正弦波磁轨迹信号。磁头在磁栅尺上移动读取磁信号,将其转变成电信号后,输出到伺服控制器,从而构成闭环位置反馈。图4是其基本原理图。
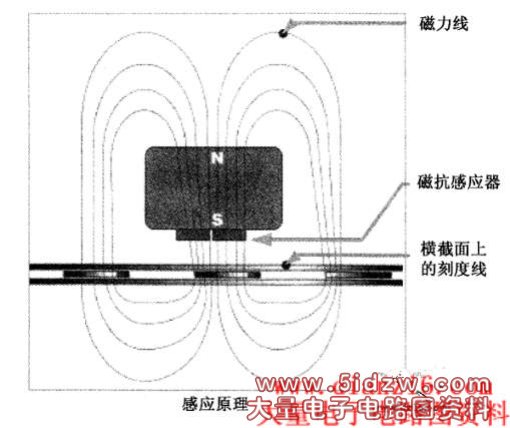
图4 磁栅尺的基本原理
目前,其分辨率最高可达1 μm,所构成的X-Y系统的位置精度通常为20μm。
特点:
磁栅尺制造简单,安装方便,稳定性高,量程范围大,能有效抵抗如灰尘、油污、潮湿,以及其他工业环境中的污染、冲击和振动。
磁栅尺构成的线性系统的理论反馈精度与旋转编码器的计算方法是一样的,不再讨论。
(3)光栅尺
光栅尺构成的系统与磁栅尺系统类似,由光栅尺和读取头构成。光栅尺是在透明玻璃或金属镜面上真空沉积镀膜,利用光刻技术制作均匀密集条纹(每毫米约100~300条),条纹间为等间距平行分布。
1)基本原理
光栅位移传感器的工作原理是:当一对光栅中的主光栅(标尺光栅)和副光栅(指示光栅)进行相对位移时,在光的干涉与衍射共同作用下产生黑白相间(或明暗相间)的规则条纹图形,称之为莫尔条纹。经过光电器件转换使黑白(或明暗)相间的条纹转换成正弦波变化的电信号,再经过放大器放大,整形电路整形后,得到两路相差为90°的正弦波或方波,最终送入伺服控制器,构成闭环位置控制系统。
,运动控制系统其他部件