设计原则
设计目标是制造一个能够集成到普通RC模型的速度控制器中的部件,能够产生电机的失速电流。由一对12V船用凝胶电池串联作为电源供电。可以计算出每个电机电流约为50A。设计必须满足下述条件:
●以24V直流船用电源驱动。
●可以驱动150W直流恒磁马达。
●可与容易购买的无线电控制(RC)模型的速度控制器接口。
●便于安装和维护。
●能够根据操纵杆传感器信号调整马达的速度。
●能够模拟传统RC模型的速度控制器,具有完全成比例的向前、向后的速度控制。
●可以驱动马达直到失速条件,并且能够自动恢复。每个马达的失速电流额定值必须在控制器的电流能力之内。因为在格斗中机器人的马达经常会失速。
●经密封爆破测试(若可能的话)。
无线电控制
大多数无线电控制(RC)系统都使用PPM(脉冲相位调制)或PWM(脉冲宽度调制)方式传送来自操纵杆传感装置的信号到RC控制模型的接收装置。一般每20rm一次,由RC系统中的转换器将操纵杆或控制开关的位置信号转换为宽度为1.0~2.0ms的脉冲。各厂家的产品中实际的参数一般非常接近。将此脉冲信号馈送给用于应答的电机伺服装置,就可以控制机器人运动到新的位置。如果馈送一个稳定不变的信号,可以使机器人保持稳定状态,不作运动。这个伺服器可以用速度控制器来代替。当操纵杆从中心位置向前移动时,即机器人从停止位置向前运动时,速度控制器将引起马达向一个方向的转动。如果此时将操纵杆通过死区(停止或不确定)向另一方向移动,将引起马达失速和逆向运动。
导通时间
近年间,控制直流马达的方法已经开始采用PWM技术。最初出现的是将马达的整个电源的电压非常快速地开关。由通/断周期的时间之比(占/空比)的变化来设置和改变马达速度。一般来说,接通时间越短,关断时间越长,马达速度就越慢。随着接通时间的增加,电机转速增大。通过改变通/断时间比率。电机转速几乎可以在停止和全速之间无级地变化。在整个速度变化范围内,基本上可以获得全部扭矩。样机中所使用的马达速度控制器FutabaMc2IOCB的工作频率约为50Hz。电机放大器需要与此Futaba控制器保持同步。
设计要点
本文介绍的电路即辅助速度控制器。设计为可以与单独的主速度控制器接口。随后可以进行全部信号处理,区别出操纵杆的位置、速度和方向。辅助速度控制器(即电机放大器)可以增大驱动电流和电压的强度,并且向直流马达提供所需要的功率。例如可以很容易地控制150W、24V的电动轮椅马达。更高额定功率的马达尚未用此装置进行过测试,但是,看不出有任何不能有效地驱动500W,甚至更高功率的马达的原因。本设计通过了大量的测试。在两次机器人对抗的最后时刻,有很多机器人的马达和控制器失效。但本设备的控制器保持完好,工作正常。
驱动马达的每个场效应管的最大持续电流为60安培,受此限制可以用4个场效应管来提供150A的电流。在电流达200A时,场效应管的耗散热量为160W。而电源电压为24V时,每个马达的额定功率将可达到4.8kW。
速度控制
主速度控制器建立控制脉冲宽度,并提供向前、向后波形之间的联系,基本变化区间为1.0~2.O ms。例如:脉宽从1.4―1ms间变化将使马达向前的速度从0逐渐增加到全速;静止区段1.4~1.6ms期间将不向马达提供驱动力:而脉宽从1.6~2.Oms期间主控制器将驱动马达反转。伺服器接收到的脉宽越长,反转的速度就越快。脉冲宽度的信号每20ms更新一次。所产生的PWM驱动信号频率约为50Hzn.
还要使用一种可以改变脉冲宽度的单稳态电路。它可以平衡对于机器人的两个主马达的驱动力。在具有两个驱动马达的机器人的情况下,驱动力来源于两个分立的装置,若替换马达与原来的马达不匹配,此单稳态电路可以在主驱动脉冲结束时触发另一个脉冲,以图平衡较弱的马达的驱动能力。在初次调试机器人控制器时,实际上常会注意到:当机器人要直行时,却会逐渐地向右(或左)转。只有在右侧驱动马达(或左侧)驱动马达有一点加力存在时,机器人才能够完全直行。
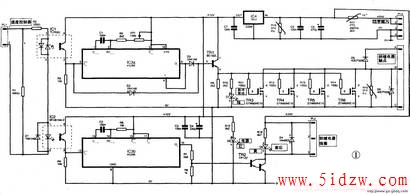
电路图
电机驱动放大器的电路见图1:它基本上由两部分组成,一部分用来产生电流和增加电流负载能力,即放大器部分;另一部分是用于检测原始驱动信号的极性的装置。这是因为机器人模型的速度控制器具有向前、向后运动的功能,信号极性必须被主速度控制器检测到。当主速度控制器信号极性翻转被检测到时,马达电流反向继电器必须接通。
控制信号由主速度控制器来产生。其电源电压必须高于4.5V,最好为5.OV,这样才能保证正常的驱动电流进入放大器。驱动信号由连接器PL1输入,随后馈送到负载电阻R1。对于主速度控制器来说,它部分地仿真马达的作用。与R1并联有两个光电隔离器。其中IC1进行隔离,但允许从主速度控制器来的任何极性的脉冲(交流信号)通过,到后面的电路中进行处理;而IC2则仅当信号极性使光电隔离器的二极管做正向偏置时才允许从主速度控制器来的直流信号通过。
通过IC1的交流信号送给单稳态电路IC3a,其下降沿触发输入管脚5,引起管脚6的输出变高电平一个周期。周期长度由电容C1和组合电阻R5、预置电阻VR1来设置。产生的脉冲宽度值为70 μ s~2.5ms。从管脚6通过二极管D3送到输出控制晶体管TR1。同时二极管D2则绕过IC3a传送主驱动信号到TR1的基极。与D3形成一个明显的'或'门,从而将单稳态电路所产生的脉冲并入到驱动脉冲的后面。晶体管TRl组成一个射极跟随器,并且其射极通过缓冲电阻R10驱动LED管D7,用于指示有脉冲被馈送到场效应管TR3-TR7。二极管D5和D6用于对驱动电路的附加保护,以限制反向传送的信号,并且能够保护电路避免受到马达产生的感应脉冲的影响。元件R19是一个组合的31V压敏电阻,用于限制某些瞬间的正句过电压出现而破坏驱动管。
单稳态电路IC3b仅当向前驱动信号的极性引起IC2导通时接受触发脉冲,并且通过光电隔离器传送此信号。而反向驱动信号则不被其接受。这个单稳态定时时间被设定为大于所使用的RC系统的祯频。在这种情况下,脉冲的重复周期为20ms。但是一旦被触发,由于单稳态电路保持导通的时间被设置为28 ms(由C2和R6决定)。因此,在有机会被关闭之前,会被重复触发。从而保持其输出脚第10脚持续为高电平(导通)。从而提供电流来驱动继电器的驱动器TR2。这是借助于PL2提供电流给驱动马达反转的继电器的一个达令顿晶体管。
本电路中,用来防止临时输入电源电压瞬间超过限制电压31V的是第2个压敏电阻R18。而热敏电阻R17用来限制由于较长时间电压不稳定所引起的超量。
场效应管选择
制作此电路时需要考虑的一个重要问题是:选择驱动马达的场效应管。在同样价格条件下,那些具有较低RDS的管子较好。这里选用的场效应管STW60NE10的RDs仅为16mΩ。另一种管子FGA70N10的RDs为23mΩ。
值得注意的是:虽然每个单独的场效应管的RDS的影响与整个机器人的布线,机器人的动力电池和继电器等的影响相比几乎可以忽略。但性能好的元件的开销总是值得的。样机在格斗中虽然多次被冲撞、旋转,但这个控制器仍保持正常工作。