1 引言
电荷耦合器件(Charge Coupled Device)是美国贝尔实验室的W.S.Boyle和G.E.Smith于1970年发明的半导体器件[1]。它被视为七十年代以来出现的最重要的一种半导体器件[2]。CCD由于具有信号输出噪声低、动态范围大、量子效率高以及电荷转移效率高等优点,因而以CCD为探测器的相机在机器视觉系统、安全保卫系统、智能交通系统以及Internet接入装置等领域都得以广泛应用。随着CCD技术的迅速发展,CCD相机也朝着速度更高、控制更方便、品质性能更好的方向发展。
虽然有些CCD仅需要时序信号而不需要功率驱动,但大多数高性能CCD是需要功率驱动的,且驱动波形要求是双极性的且幅度都较大。所以CCD时序产生单元[3]产生的TTL信号需要进行电平搬移和放大。而CCD为容性负载,所以在高速驱动脉冲作用下会产生较大的瞬态电流,这就需要驱动电路具有足够强的电流驱动能力。当前以CCD驱动集成电路来实现CCD功率驱动可以满足一些相机要求。然而当CCD驱动波形为双极性时,单电源工作的驱动集成电路仍然需要外加电平搬移电路。当CCD的驱动波形电压幅度超出CCD驱动集成电路的工作电压时,这些驱动集成电路就不能满足要求了,所以本文在分析了CCD功率驱动电路及其要求的基础上,设计了采用分立元器件的较通用的CCD相机功率驱动电路。
2 CCD功率驱动电路及其要求
图1所示是典型的CCD相机框图。CCD相机一般由CCD感光芯片、CCD时序发生器、CCD功率驱动器、模拟处理前端、数字图像处理单元、控制器、电源部分以及外部光学成像系统等组成。从图中可以看出CCD功率驱动部分的作用是把CCD时序产生单元输出的各种转移脉冲信号进行功率放大,以满足CCD对驱动波形电压及电流以及时序的要求。驱动信号的好坏会对CCD的电荷转移效率产生较大的影响,从而影响成像的质量。
图1 CCD相机框图
Fig.1 the block diagram of the CCD camera
对功率驱动电路的要求是,波形电压摆幅满足CCD的要求,波形的上升和下降沿足够快以满足CCD的要求。由于CCD为容性负载,由下面电容模型的公式可以算出驱动器需要提供的瞬态电流。

上面的计算中定义上升或下降沿的时间对应电平幅度的10%到90%,设边沿变化为线性的,负载为300pF电容,电压幅度为20V,上升或下降沿的时间为20ns,那么在边沿变化处会产生的电流为0.24安。在更高速的情况下电流将会更大。
综上可见,对CCD功率驱动电路的要求是在较大电压摆幅情况下在快速的变化沿时能够提供足够大的瞬态驱动电流。因此CCD功率驱动器的温度往往较高[4],选择器件时要选择工作电流足够大的器件以满足要求。
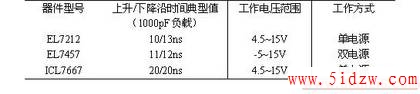
表1列出了当前使用较广泛的几个CCD功率驱动集成电路。从表中我们可以看出EL7457的上升和下降沿的变化最快,而且它为双电源工作,因此不需要额外的电平搬移电路,但是EL7457的缺点是其工作电压范围较窄。注意,表中所列的电压-5~15V是表示正负电源的最大范围,实际上其正负电源的差值最大是15V[5],所以如果负电源为-5V时,正电源只能达到10V,只有负电源为0V时,正电源才能达到15V。且EL7457的负电源也只能达到-5V。EL7212的上升和下降时间和EL7457相近,但是其为单电源工作,在双极性的驱动波形情况下,需要另外的电平搬移电路。ICL7667也是单电源工作,上升和下降沿较慢,只能用在相对慢速的CCD相机中。
表1 几个CCD功率驱动集成电路性能指标
Tab.1 Performance of some CCD driver IC
3 CCD功率驱动电路分析与设计
根据上述对CCD功率驱动电路的具体要求,我们通过细致分析,设计了如下的电路形式。图中时序发生单元的时序信号用脉冲波发生器和等效内阻R2模拟,负载电容为C3这里设为300pF。
图2 CCD相机功率驱动电路图
www.5idzw.comFig.2 the circuit of CCD camera power driving
首先时序发生单元的时序信号经过电容C1和C2耦合到二极管钳位端,两个二极管D1和D2及两个电阻R1和R4用于把电容耦合过来的信号钳位到固定的电平。这里正电平为+10V负电平为-10V。其中二极管D1把信号钳位到正电平,使信号在正电平的基础上向下摆动。同理二极管D2把信号钳位到负电平,使信号在负电平基础上向上摆动。注意二极管的方向要正确。这样产生的两个信号就用于控制两个开关三极管的导通与截止。两个互补的三极管的集电极接在一起作为开关输出,注意若把发射极接在一起则为射极跟随器而非开关工作。当加在Q2基极的控制信号向上摆动时,三极管Q2就会导通,而这时加在Q1基极的信号恰处在高电平期间,因而三极管Q1截止,所以输出到负载C3的信号为低电平。同理,当加在Q2基极的控制信号为低电平时,三极管Q2截止,而这时加在Q1基极的信号恰以高电平向下摆动,因而三极管Q1导通,所以输出到负载C3的信号为高电平。因此,该电路为反相驱动电路。电阻R3可以控制加在负载电容的波形的边沿变化时间。
在该电路中,二极管选用Philips公司的高速肖特基二极管,型号为BAT85/PLP[6]。其参数为:反向连续电压VR为30V,前向导通压降VF在前向电流IF为1mA时为320mV。反向恢复时间trr为4ns。三极管也选用Philips公司的开关三极管,型号分别为BSR14/PLP[7]和BSR16/PLP[8]。其中VCEO参数BSR14/PLP为40V,BSR16/PLP为60V。集电极电流IC参数BSR14/PLP为800mA,BSR16/PLP为600mA。这些参数都可以满足驱动波形电压范围宽,瞬态电流大的要求。
上述电路的各个元器件参数是按照10MHz的像素转移时钟给出的,若为其他的转移时钟或频率有所变化,则可以修改上述参数,而电路结构形式不变化。
4仿真及实验结果
为了验证设计的正确性及合理性。上述设计的电路在Cadence公司的OrCAD PSpice AD软件下进行了仿真。仿真的结果也再次证明了设计电路的合理性。图3为仿真结果的波形图,从图中可以看出该电路为反相驱动,输出相对与输入有10ns左右的延时。输出波形在幅度上和边沿变化时间上均符合要求。

图3 仿真结果波形图
Fig.3 the waveform of simulation result
按照上述电路结构,我们采用对应的元器件搭建了相应的实际电路。实验的结果和仿真的结果基本一致。这表明此电路可以用在CCD相机中,这样可以降低成本提高可靠性。
5结论
本文的创新点是:以较少的分立元器件实现了高性能的CCD功率驱动电路,它可以用在传统CCD功率驱动集成电路在一些情况下无法胜任的场合。
CCD功率驱动电路对CCD相机的性能具有较大的影响。而目前可供使用的CCD功率驱动集成芯片有时候需要外加电平搬移电路有时候无法满足电压摆幅等方面的要求,且实现时成本较高。为此,本文设计了采用分立元器件实现的CCD功率驱动电路。该电路相对于目前采用CCD专用功率驱动集成芯片实现的电路具有成本低、可靠性高、工作电压范围宽等优点。因此,当现有的驱动器集成电路不能满足要求时,可以使用该电路实现CCD相机的功率驱动。