7. 将Line功能块的错误接线端和资源接线端连接在一起。
8. 将第一个Line功能块的完成输出连线至第二个Line功能块的执行输入。
9. 将第二个Line功能块的velocity(速度)、acceleration(加速度)、deceleration(减速度)、acceleration jerk(加加速度)和deceleration jerk(减减速度)输入连接到步骤3中所创建的控件上。这将使得第二个功能块的运动参数值和第一个功能块相同。
10. 右击位置输入,并从快捷菜单中选择创建?输入控件,向前端面板中增加第二个位置信息的控件。
11. 向方框图中增加一个合并错误VI,并将Read功能块和第二个Line功能块的错误输出连线到合并错误 VI。
12. 右击合并错误 VI的错误输出输出,并从快捷菜单中选择创建?显示控件,向前端面板中增加一个显示控件。
13. 将错误输出连线到定时循环的边沿。
14. 在为错误输出所创建的循环通道上右击,并从快捷菜单中选择替换为移位寄存器。这会将错误信息传递给下一个循环迭代。
15. 将错误输出连线到定时循环另一侧的移位寄存器上。
16. 右击移位寄存器,并从快捷菜单中选择创建?常量,初始化定时循环外部的错误簇。因为最终的硬件会使用LabVIEW实时模块,所以要在定时循环外部初始化所有功能块阵列(array)和簇(cluster),以避免系统抖动。在定时循环内部,在那两个Line功能块底下放置一个Read功能块。
一般是在主机上(而非在确定性定时循环中) ,通过读取目标发布的数据来读取并绘制位置信息。为了简化,本例中包含了数据读取部分。
17. 将资源和错误输出连接到第一个Line功能块的资源和错误输入上。
18. 为位置[]输入创建一个常数,并将该矩阵的前两个元素设为0。将位置[]常数移出定时循环。这样初始化阵列可以无需为功能块分配内存。
19. 右击定时循环的条件接线端,并从快捷菜单中选择创建?输入控件,向前端面板中增加一个停止按钮。这将允许你在任何时候停止运行VI。
完成上述步骤后,你的方框图应该与下图类似:
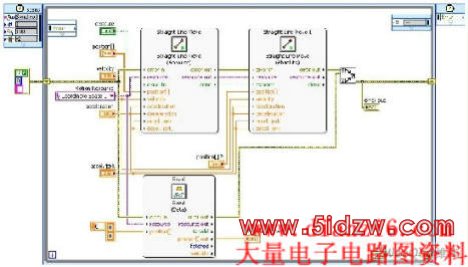
图8. 程序框图
切换到前面板。
23. 在 位置[]数组中,将数组的前两个元素设为5000。这将指定一个x y坐标(5000, 5000)。
24. 在 位置[] 2数组中,将矩阵的前两个元素设为0。这将x y轴移回至(0, 0)。
25. 暂时保持速度、加速度和加加速度的默认值。
26. 在前面板中增加一个波形图。
27. 切换到程序框图,将Read功能块的位置[]输出接线端连接到波形图显示控件上。完成以上步骤后,您的前面板应该与图9类似。
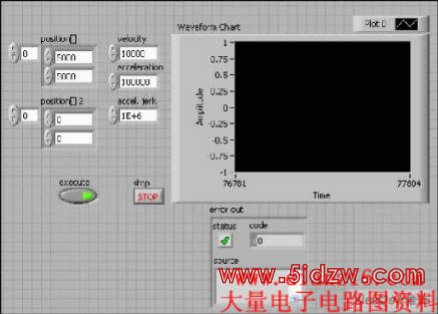
图9. 前端面板
28. 保存VI。
29. 保存项目。
发布、测试并使用VI
完成以下步骤,发布、测试并使用VI。
1. 运行VI。LabVIEW将该VI以及该VI所使用的所有模块和I/O变量部署至控制器中。
2. 点击执行输入控件,启动任务。
3. 在前面板中,确认位置图在更新。
4. 单击停止按钮,停止VI。
5. 修改任意输入参数,然后运行VI,再次点击执行控件,看看不同参数的结果如何。
连接至伺服式和步进式驱动
针对CompactRIO 的NI 951x C系列驱动接口可以直接连接到数以百计的步进式和伺服式驱动/电机。这些运动模块提供了单轴的伺服式或步进式驱动接口信号。另外,它们还提供了一组完整的运动I/O,包括原点开关和限位开关的输入、位置反馈信号的正交增量式编码输入,以及数字输入线和数字输出线。NI 951x驱动接口包含有一个处理器,运行样条插值函数和NI专利的步长生成算法或控制环。
下面来看看如何连接至NI P7000系列步进式驱动。要了解如何连接到第三方的P-command步进式或伺服式驱动,请参考安装在LabVIEW NI SoftMotion Module 中的NI SoftMotion帮助文件。
连接到P7000系列步进式驱动
本部分介绍了如何采用NI 9512-to-P7000 Stepper Drives Connectivity Bundle(NI 9512-to-P7000步进式驱动连接包),将NI 9512步进式驱动接口连接到P7000系列步进式驱动。该产品中有一根线缆,直接将NI 9512 D-Sub连接到P7000系列步进式驱动;以及一个37管脚的接线块和线缆,将NI 9512 MDR连接头连接到其它I/O上。
完成以下步骤,将NI 9512驱动接口连接到P70530直流驱动或者P70360交流驱动和其它I/O。图10中是一幅简化的连接图。
1. 根据机箱文档说明,在机箱中安装模块。
2. 采用NI 9512-to-P7000线缆,将D-sub连接头模块连接到P7000系列驱动上的Command I/O连接头上。该线缆为步进式输出、驱动使能输出和驱动错误信号提供连接。
3. 将电源连接到NI 9512-to-P7000上的直接连接线缆+24 V输入。
4. 采用接线盒线缆,将MDR连接头模块连接到37管脚的接线块上。
5. 将硬件设备上的其它I/O信号连接到37管脚接线块或者自定义线缆上。参考图11了解接线盒的引脚。
a.将接线块上的Forward Limit(前向限位)、Reverse Limit(反向限位)和Home(原点) 输入连接到限位和原点传感器上。
b.如果你使用编码器来反馈位置信息,则请将编码器的输入连接到编码器上。
c.采用所提供的接线端,连接所有额外I/O。
6. 将驱动电源连接到P7000驱动上。
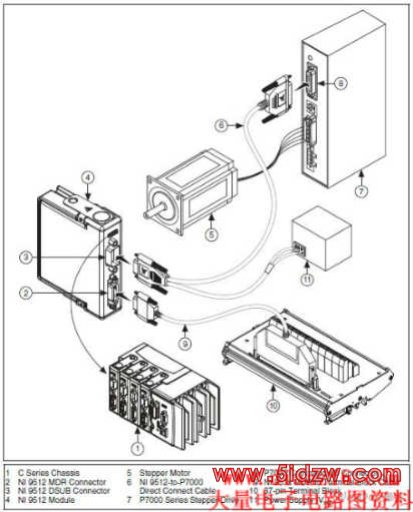
图10. NI 9512-to-P7000系列驱动连接图
注意:如果只需要将MDR连接头连接到接线盒上,则接线盒上的所有D-Sub信号都是无连接(no connects,NC)。图11中显示了只连接MDR连接头时的37管脚接线盒的引脚。

图11. NI 9512 37管脚接线块只连接MDR时的管脚分配
7. 在控制器中安装软件,创建一个LabVIEW项目,并添加NI SoftMotion轴。
8. 在项目浏览器窗口中右击轴,并从快捷菜单中选择属性,打开轴配置对话框。
9. 针对P7000驱动,在轴配置对话框中改变下述项目的默认轴设置:
a. 右击轴,并从快捷菜单中选择属性,显示轴配置对话框。
b. 在步进电机页面中,将输出方式设置为单端。
c. 在运动I/O页面的驱动信号标签页中,将驱动使能信号的输出方式设置为源输出。
d. 在数字I/O页面中,将驱动器错误/报警映射到DI 1,并将输入方式设置为源输入。
10. 在项目浏览器窗口中单击控制器项目,并选择部署全部来部署轴信息。
连接到伺服式驱动器
伺服式轴的配置
伺服式轴只能以闭环模式运行,所以必需有一个反馈设备。如果你使用NI 9514或者NI 9516驱动接口模块,那么你必须另外对反馈设备、伺服控制环和伺服驱动的驱动命令输出进行配置。图6中显示了NI 9514和NI 9516 C系列模块的轴配置对话框部分。无法配置的部分以灰色显示。
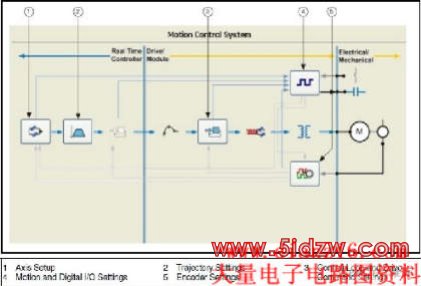
图6. NI 9514和NI 9516模块的轴配置对话框
使用增益调节测试面板
,LabVIEW NI SoftMotion和C系列驱动接口入门