0 引 言
汽车倒车防撞预警系统即是俗称的倒车雷达,是汽车泊车辅助装置。在汽车倒车时,倒车雷达采用超声波测距原理探测汽车尾部离障碍物的距离,当汽车尾部离障碍物的距离达到探测范围时,倒车雷达通过数码管实时动态显示距离。当汽车尾部离障碍物的距离达到设定的安全警告值时,倒车雷达发出报警声,以警示驾驶员,辅助驾驶员安全倒车。现在生产的中高档小轿车大多数都配置有倒车雷达,而出于节省成本等方面的考虑,经济型小轿车、大客车等其他车辆都没有配置倒车雷达。有市场需求的产品,必然会带动产品的开发设计。倒车雷达电路种类较多,本文介绍基于单片机控制的倒车雷达系统,该系统采用通用型单片机作为控制电路,方便系统功能扩展。系统电路主要采用集成器件构成,外围元件少,电路简洁、调试方便、成本低,利于商品化生产。
1 系统组成及工作原理
倒车防撞预警系统由四路收发一体封闭(防水)型超声波传感器及其超声波发射与回波接收电路、超声波电信号放大电路、单片机控制电路、LED数码管显示电路和蜂鸣器声音报警电路组成。系统组成框图如图1所示。
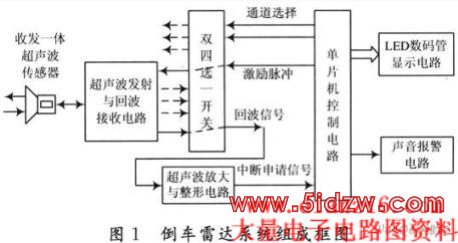
当汽车倒车时由倒车换挡装置自动接通系统电源,系统上电复位,进入工作状态。单片机编程产生一串40 kHz的矩形脉冲电压,经四选一模拟开关加到超声波发射与回波接收电路,经放大驱动超声波传感器发射出超声波,同时单片机开始计时。发射出的超声波碰到障碍物后形成反射波,部分反射波返回作用于超声波传感器,经超声波传感器的声/电转换,变成微弱的电信号,该微弱的电信号经放大、整形产生负跳变电压,向单片机发出中断申请。单片机收到中断申请的信号后,立即响应中断,执行外部中断服务程序,停止计时,得到超声波发送和返回的时间T,计算出发射点离障碍物的距离S,即:S=(C・T)/2。C是超声波在空气中的传播速度,在常温25℃时,C约为346 m/s。若发射出的超声波在测距范围内未遇到障碍物,直到单片机定时中断产生,执行定时中断服务程序,选择下一路,依次按后左路、后左中路、后右中路、后右路的顺序继续发射和接收超声波,并经过计算处理。四路探测处理完毕,选择四路中测出的最小距离值通过LED数码管显示出来。当最小距离值小于预先设定的报警距离时,单片机接通蜂鸣器的电源,蜂鸣器发出报警声。若四路探测无回波中断申请,则显示“-.--”,表明在安全距离内没有障碍物,再继续下一轮的循环探测处理。
2 系统硬件电路的设计
2.1 超声波发射与回波接收电路
超声波发射与回波接收电路的主要作用是提高驱动超声波传感器的脉冲电压幅值,有效地进行电/声转换,增大超声波的发射距离,并通过收发一体的超声波传感器将返回的超声波转变成微弱的电信号。超声波发射与回波接收电路如图2所示(画出一路,其他三路与该路一样)。

EFR40RS是收发一体封闭(防水)型超声波传感器,其中心频率f0=(40.0±1.0)kHz,-3 dB带宽1 kHz。驱动电压峰一峰值要求60~150 V。CD4052是双路四选一模拟开关,单片机的P3.4和P3.5端口输出选通信号,单片机的P3.3端口输出一串40 kHz的脉冲电压,通过CD4052的X路加到选通的开关三极管Q1基极,经脉冲变压器T1升压至100 VP-P左右,驱动超声波传感器EFR40RS发射超声波。发射时的脉冲电压幅值大小直接影响测距的远近,应采用超声波专用的脉冲变压器。反射回的超声波经原收发一体封闭型超声波传感器变成毫伏级的一串脉冲电信号。由于回波电信号的幅值小,VD3和VD4二极管截止,该信号不会通过T1变压器副边线圈形成短路。VD1和VD2二极管也截止,所以回波电信号经R1和C1,通过CD4052的Y路送到超声波电信号放大与整形电路。R1和VD1,VD2组成双向限幅电路,避免发射时的大信号造成超声波放大与整形电路阻塞,甚至损坏电路。
2.2 超声波电信号放大电路
超声波电信号放大电路采用集成电路CX20106A构成。CX20106A是日本索尼公司生产的红外遥控信号接收集成电路。通过外部所接电阻,将其内部带通滤波电路的中心频率f0设置为40 kHz,就可以接收放大超声波电信号,并整形输出负脉冲电压。
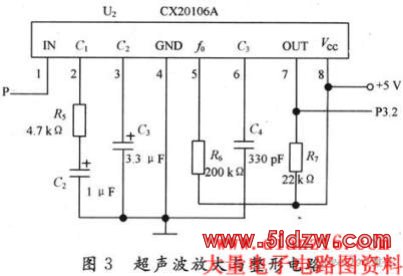
应用电路如图3所示。1脚是超声波电信号输入端,2脚与地之间连接RC串联网络,是内部前置放大电路负反馈网络的组成部分。电阻R5的数值确定前置放大电路的增益。R5电阻值减小,负反馈减弱,放大倍数增大;反之,则放大倍数减小。3脚与地之间连接检波电容C3,适当改变电容C3的大小,可以改变超声波电信号放大和整形电路的灵敏度和抗干扰能力。C3电容量大,灵敏度低,抗干扰能力强;C3容量小,灵敏度高,抗干扰能力弱,易造成误动作。5脚与电源间接入一个电阻,用以设置内部带通滤波电路的中心频率f0。
当R6=200 kΩ时,f0=40 kHz。6脚与地之间接一个积分电容,标准值为330 pF。如果该电容值取得太大,会使探测距离变短。7脚是电路集电极开路输出端,R7是该引脚的上拉电阻。集成电路CX20106A无信号输入时,7脚输出高电平,当输入的超声波电信号经放大、整形后,7脚输出一个负脉冲电压。
2.3 单片机控制电路和显示、报警电路
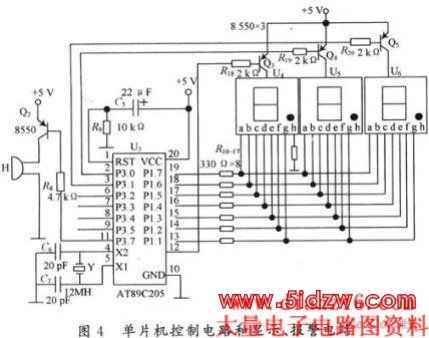
电路如图4所示。由于系统用到单片机的输入/输出端口不多,在不考虑功能扩展时,从功能够用和低成本的角度考虑,采用AT89C2051单片机作为控制电路的核心器件。AT89C2051单片机共有20个引脚,其中有15个I/O端口(P3.6无引出脚)。两个16位定时器/计数器,其体积小、价格低。采用12 MHz高精度的晶振,以获得较稳定的时钟频率,减小测量误差。单片机的P3.3端口周期性的输出一串40 kHz的矩形脉冲,通过双路四选一模拟开关CD4052周期性地加到四路超声波发射与回波接收电路。单片机的P3.4和P3.5端口输出双路四选一模拟开关CD4052的选通信号。单片机的P3.2端口为外部中断0中断申请信号输入端。三位LED数码管采用动态扫描显示。U4的小数点常亮,U4的单位为m,U5的单位为dm,U6的单位为cm。采用有源蜂鸣器作为报警发音器件,一是器件成本低,二是便于动态扫描显示的软件编程。
3 系统软件的设计
系统软件采用模块化设计,方便扩展移植。采用汇编语言编程。主要有主程序、T0中断服务程序、外部中断0服务程序、超声波发生子程序。
3.1 主程序
本系统有四路测距通道,采用分时工作,按后左一后左中一后右中一后右顺序循环测距。每一路发射超声波后的等待外部中断时间应大于超声波在最大有效探测距离内往返时间。所以按最大有效探测距离可以估算出最短的循环间隔时间。因为超声波在空气中传播能量会不断衰减,所以超声波测距存在最大有效探测距离。这最大有效探测距离与多种因数有关:
与超声波传感器性能的好坏、与驱动超声波传感器的脉冲电压幅值(功率)的大小、障碍物大小和形状、障碍物吸波特性以及反射波与入射波之间的夹角、与超声波放大和整形电路的灵敏度等有关。设定最大有效探测距离为8 m(收发一体封闭型超声波传感器比较难达到,实际上也没有必要探测很远的障碍物,只是设计留有裕量。由于显示位数有限,也必须对最大探测距离做限制),则循环工作的间隔时间Tm=2S/C=2×8/34*6 ms,加上避免接收超声波传感器余振的延时和程序执行时间,留足裕量,设定Tm△56 ms。