电容式角位移传感器用于测量固定部件(定子)与转动部件(转子)之间的旋转角度,因其具有结构简单,测量精度高,灵敏度高,适合动态测量等特点,而被广泛应用于工业自动控制、汽车、航天及军事等角度定位监测领域,一般来说,电容式角位移传感器由一组或若干组扇形固定极板和转动极板组成,为保证传感器的精度和灵敏度,同时避免因环境温度等因素的改变导致介电常数、极板形状等的间接变化,进而对传感器性能产生不利影响,对传感器的制作材料、加工工艺以及安装精度提出了较高要求,为了克服电容角位移传感器的局限性,国内外科学工作者进行了长期的大量研究工作,其主要思想方法是将传感器设计成差动结构,杰出的代表是瑞士Camille Bauer公司研制的角度位置变送器,其精度为0.5%,环境温度范围-20~+60℃,温漂±0.2%/10℃。
1996年,Brasseur等人提出了一种新的电容式角位移传感器的测量原理,称为比例测量原理,该原理同时具有比例特性和差动特性,可以抵消相当程度的放大器增益误差和系统误差,且在一定范围内能够消除机械安装误差,从理论上克服了环境温度变化对传感器产生的不良影响,对温度漂移具有很好地抑制作用,本研究在比例式电容测角原理的基础上,设计了一种转动极板为金属材质且为电气悬空设计的数字电容式角位移传感器,测量范围180°;并针对快速变化的温场,进行了传感器温度特性测试,旨在通过实验进一步验证基于该原理的角位移传感器抑制温度骤变的能力。
1 敏感元件的结构
测量范围180°、转动极板为金属材质且为电气悬空设计的数字型角位移传感器的敏感元件基本结构如图1所示,由三块同轴且平行的极板构成,即两块固定极板和一块位于两者之间的可自由转动的转动极板,两固定极板分别称为发射电极和接收电极,其中发射极板分成等面积的8瓣,对顶角两瓣电气相连(图1(a)中标号相同的分瓣,如C1与C1电气相连,C2与C2等等);接收极板为-360°的圆形导电极板;转动极板由两个等面积的对称叶片组成,叶片的圆心角为90°,转动极板的直径大于发射极板,而发射极板的直径又大于接收极板,此外,发射与接收极板的内外缘均设计有接地保护环(如图1中A,B所示),用于降低散射场的效应。传感器转轴与转动极板材质相同,均为具有低膨胀系数的金属材质,且彼此电气绝缘,即转动极板处于悬空状态,其优势在于悬空设计的金属转动极板不仅可以使得相同尺寸结构的敏感元件有效测量电容值和灵敏度得到提高,同时悬空设计的另一个直接作用是取代了电刷设计,消除了机械磨损,提高了可靠性,延长了传感器的使用寿命,为提高传感器系统的抗干扰能力,将传感器敏感元件与测量电路封装在一个密闭的金属壳体之中,发射极板和接收极板的相背面均覆铜接地,相对面内外侧圆环亦覆铜接地构成保护环(如图1中的A和B)。

图1 电容敏感元件基本结构
(a)轴;(b)发射极板;(c)转动极板;(d)接收极板
2 测量原理
2.1 程控激励模式
由于转动极板在发射极板和接收极板之间旋转,因此发射极板与接收极板所组成的4个电容随转动极板旋转而变化,当一定模式的激励施加在发射极板上时,这4个电容在接收极板上所产生的感应电荷也不同。
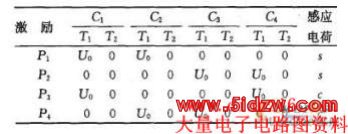
针对图1敏感元件结构,本文给出比例式测量所需的激励模式时序,如表1所示,表中C1、C2、C3、C4表示四对电容极板,P1、P2、P3、P4为4种激励模式,表示不同时刻对分瓣电容极板施加不同的激励,T1+T2为一个激励周期,本研究中,由程序根据电荷检测电路充放电时间常数、A/D转换时间和采样信号的稳定性判据,自动控制4种模式的周期长度,故又可称为程控激励模式,当被选中单元施加激励后,即T1开始,产生的感生电荷流入电荷检测电路,当充放电时间常数一定时,电荷检测电路上的输出电压稳定,硬件滤波后,立即启动A/D进行采样(即氏D时刻开始采样),为提高精度,采样次数提高为n次,当n次AD采样结束时,送入滤波单元*定咒次采样信号的稳定性,若满足*定指标要求,则通过单片机程序控制I/O单元,强迫中止对被测电容的选通,同时使被测电容发射极板上的激励中断,并强制拉回低电平,T1结束;而在T2时间内,激励信号均为低电平,以降低功耗,设在瞬间激励序列内,转动极板静止且激励电压为常量U0或0,则在P1~P4模式下激励,接收极板上产生的感应电荷分别为s、s-、c、c-以这种程控激励模式的设计与原比例式电容角位移传感器中的激励模式相比,不仅充分节约了时间,提高了采样精度,而且有效地降低了传感器功耗。
表1 激励方式和测定值的对应关系
2.2 角度计算方法
给出了转动极板为金属材质且为电气悬空设计、测量范围0~180°的基于比例式电容测角原理的角位移传感器的计算公式,即:
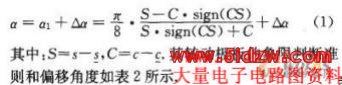
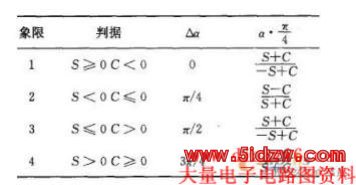
表2 象限判据、偏角与输出角度计算公式
3 传感器系统构成
传感器系统原理框图如图2所示,由敏感元件、测量电路、智能部件与接口部件构成,敏感元件的结构所示如图1,测量部件由选择单元、激励源和电荷检测单元组成;智能部件由I/O单元、A/D单元、滤波单元、角度计算单元等组成;接口部件由电流输出单元、RS232通讯单元等组成。
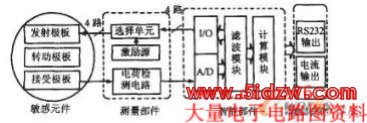
图2 角位移系统原理框图
敏感元件检测反映角度位置的电容值,是传感器的初始转换单元,测量单元采用了先进的抗杂散微小电容检测电路,将电容值转换为电信号,智能部件的主要功能是通过比例式算法计算出角位移量,最后由接口部件输出角度计算结果。
4 样机温度特性测试
4.1 测试系统
实验在高低温试验箱中进行,试验箱的温度范围是-40~+100℃,温度波动度小于士0.5℃,温度均匀性小于士2℃,试验箱工作室内有鼓风装置,可以保证箱内的空气由风机鼓动在箱体内循环,使箱内温度均匀,图3为实验系统的示意图,三台传感器样机置于试验箱内,根据通讯协议与上位微型计算机进行串行通讯,上位机控制实验进程、负责数据采样、相关信息储存与数据处理。
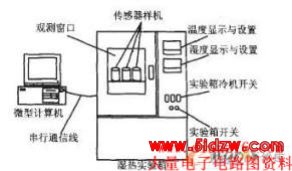
图3 实验系统结构图
试验箱的温度通过设置试验箱的温度终值来调节,在本研究中,为模拟环境温度骤变的恶劣工况,试验箱温度从-15℃上升到+65℃约需13min,平均升温速度为6℃/min,温场温度与时间关系的函数(T=g(t))曲线如图4所示。
